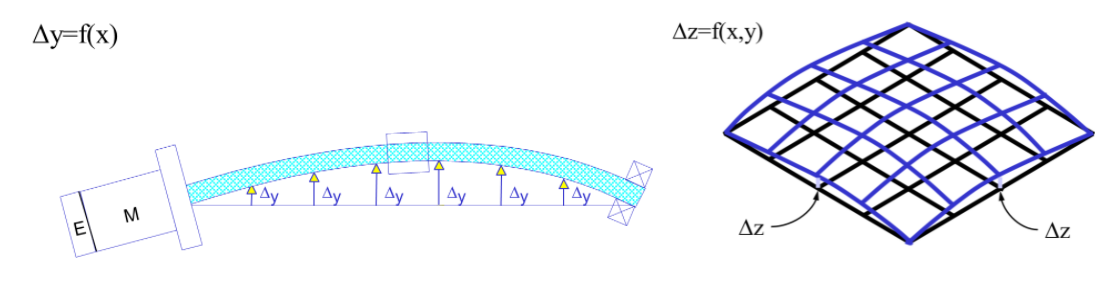
1차원 Error와 2차원 Error의 보정 방법 Power PMAC은 자체적으로 제공하는 Mapping Table을 존재한다. 기존의 명령으로 저장하던 작업을 GUI를 이용하여 작업할 수 있다. IDE를 실행시킨다. Menu/Delta Tau/Compensation Table을 실행 아래와 같은 창이 실행된다. Menu Description 1 CompTable Number 현재 작업할 Table의 Number 2 CompTable Dimension 작업할 모터의 구조 ( 기본값 : 1D : Linear ) 3 Source Motor 위치를 보상해 줄 기준 모터 번호 4 Number of Targets 기준 모터의 타겟 모터 수 기준 모터의 이동 거리에 따라 타겟 모터의 보상 값도 같이 적용된다. 5 ..